

こんにちは、MIBです。
本日はデスフィズの股関節の作成について紹介します。
可動モデルを作る場合、股関節ってギミックの盛りどころなんですよね。
一昔前のキットは「ここにこういう可動軸を入れました」という感じで、確かに動くんだけど効果がよくわからないような可動軸設定が多かった気がします。
しかし近年はMGはもとよりHGクラスのキットでも太ももを前に振り上げた時に短足気味にならないように股関節軸の位置移動ギミックを搭載しているものは結構ありますし、HGUCデスティニーのようにサイドアーマーを逃がしてポージングしやすくするようなギミックを持ったキットもあります。
これらを参考に、単に可動軸を追加するためのギミックではなく、作りたいものにあった狙った可動をさせるためのギミックを搭載できるように意識して取り組みました。
盛り込みたいギミック
盛り込みたいギミックは
- 腰の前後屈ギミック
- 股関節軸位置の移動ギミック
になります。
腰の前後屈ギミック
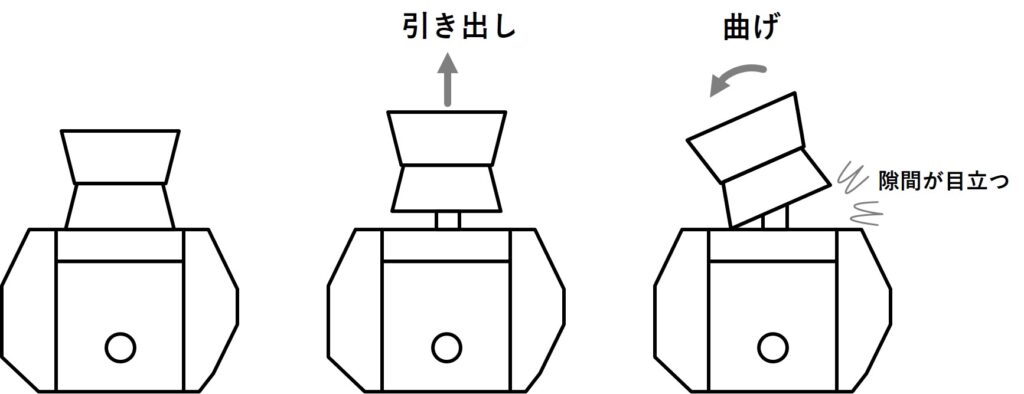
腰の前後屈ギミックは通常のHGクラスの構造では
- 腹部を持ち上げる(稼働するクリアランスを確保する)
- 曲げる(1でできたクリアランス分動かせる)
という流れで稼働させます。
ただこの可動だと曲げた反対側に大きな隙間が目立ってしまいます。
ここを隠すための部品を入れるなど対応はできますが、その部品を入れる隙間が目立つ、といった堂々巡りになることが多いです。
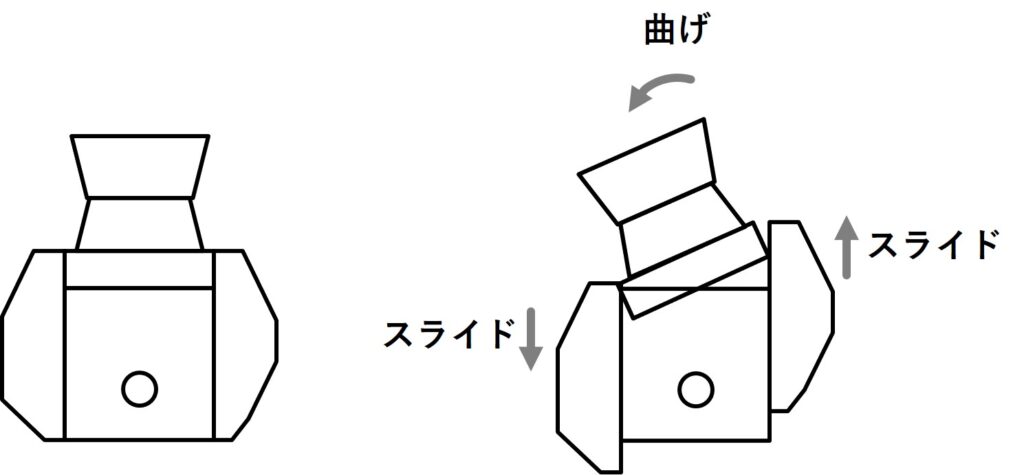
そこで今回は、腹部ではなく股関節フレーム自体に前後屈ギミックを持たせてそもそも可動用のクリアランスを確保しておき、可動時に隙間を作ることがない構造を目指します。
股関節軸位置の移動ギミック
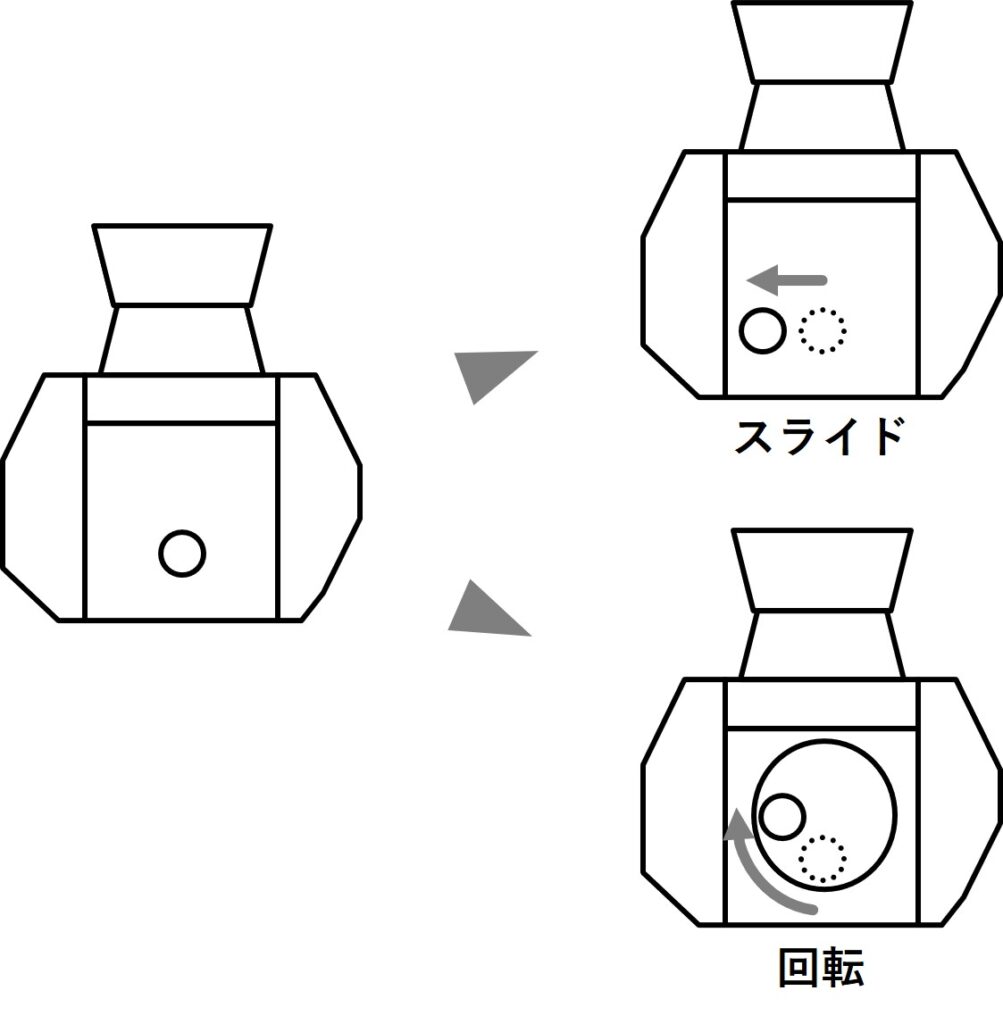
股関節軸位置の移動ギミックは大腿部を前に持ち上げるときに短足に見えてしまうのを防止する有用なギミックで、採用されているキットでは軸のスライド移動をすることが多いと思います。
ただ自作の、しかも小型MSの股関節軸に、前後屈ギミックとスライドギミックを合わせて仕込む構造を考えられなかったため、股関節軸自体を円形のフレームの中に構成して、円形フレーム自体を回転させることで軸位置を移動させるようにしたいと思います。
股関節軸
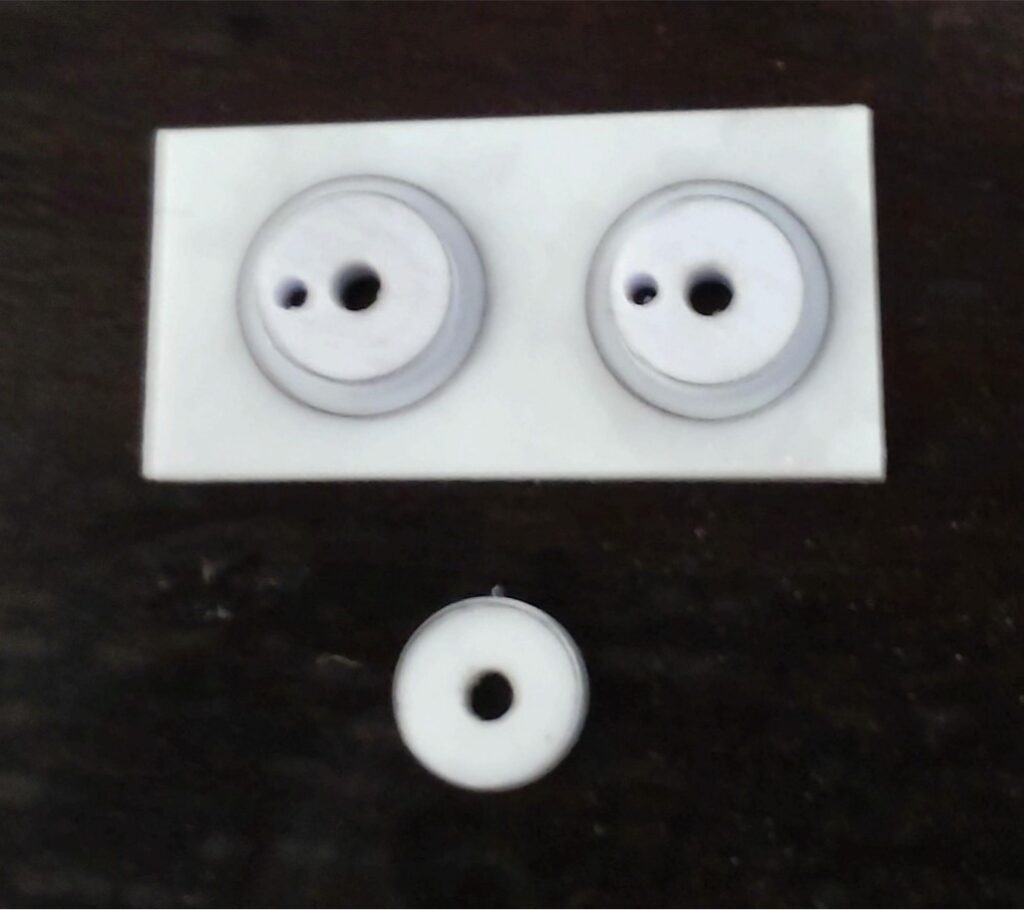
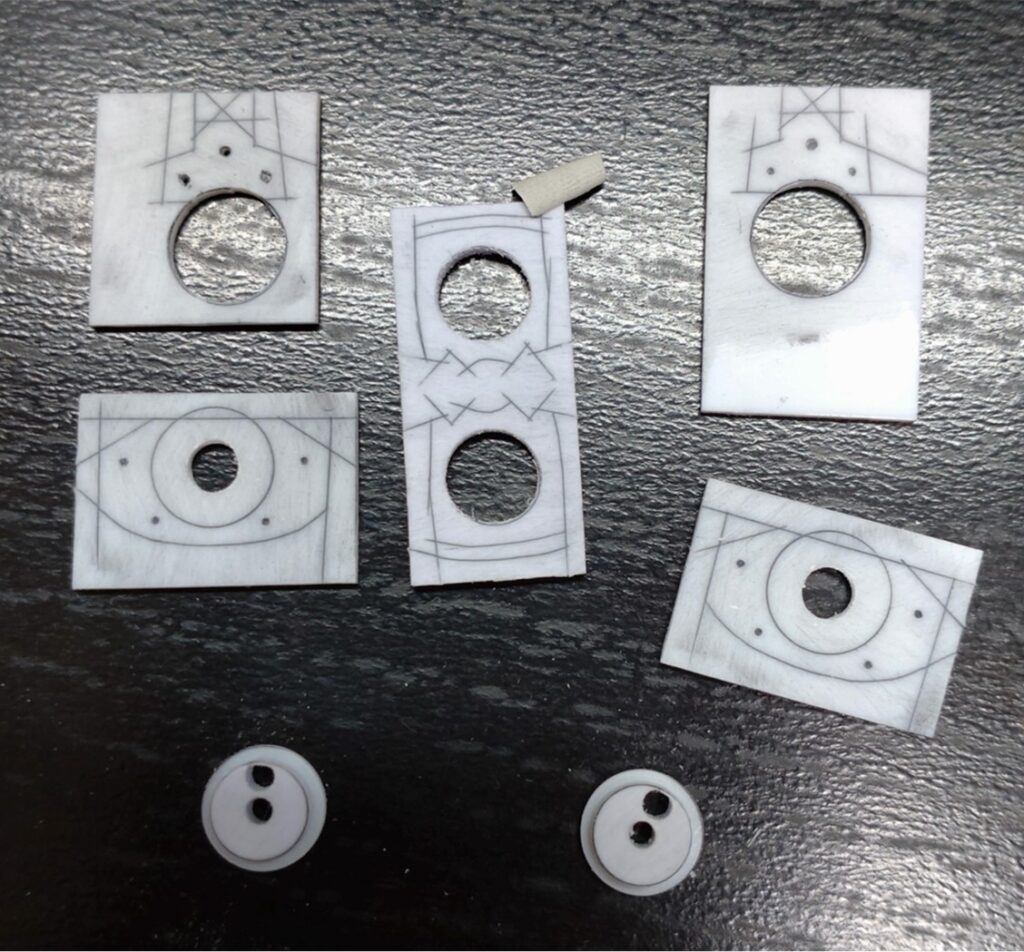
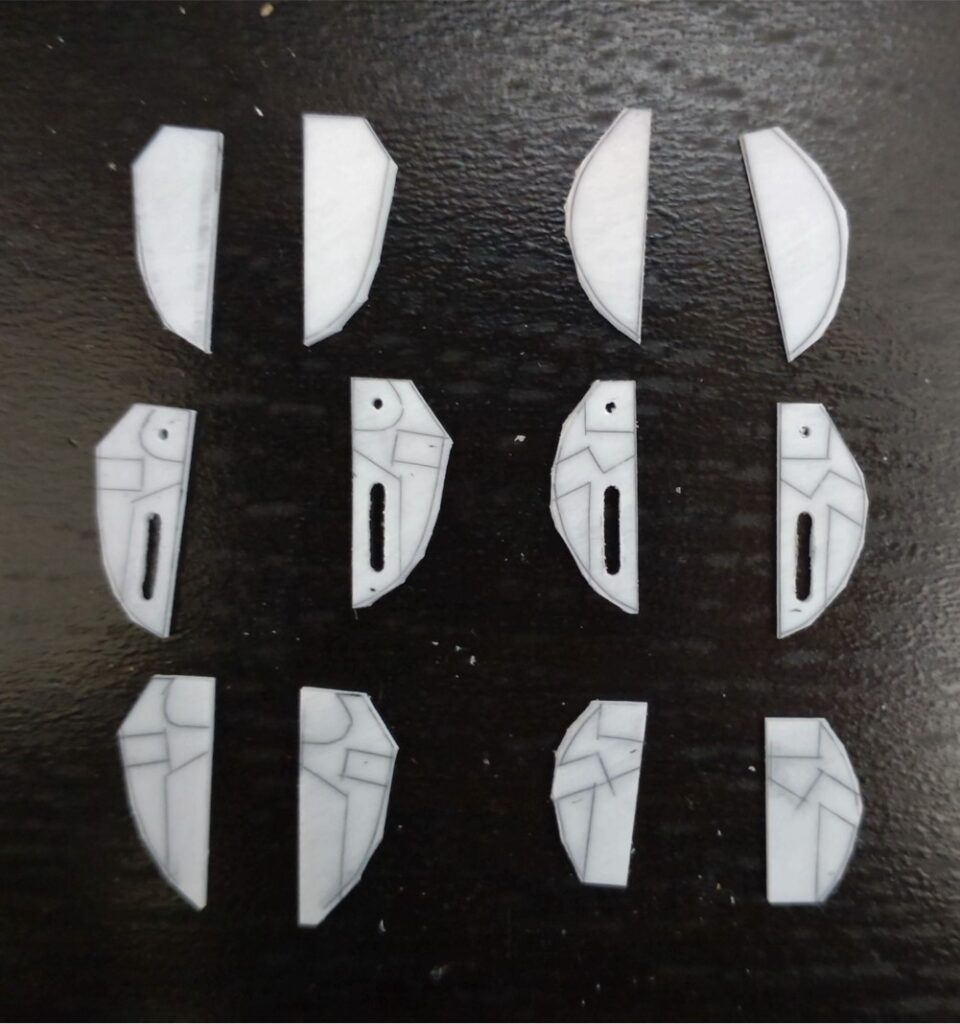
まずは股関節軸を構成する円形フレームを作ります。
これは単純に円形に切り出したプラ板を貼り付けて作成しています。
円形の切り出しは大まかにニッパーで切り出した後、リューター旋盤で形状を整えています。
股関節フレーム
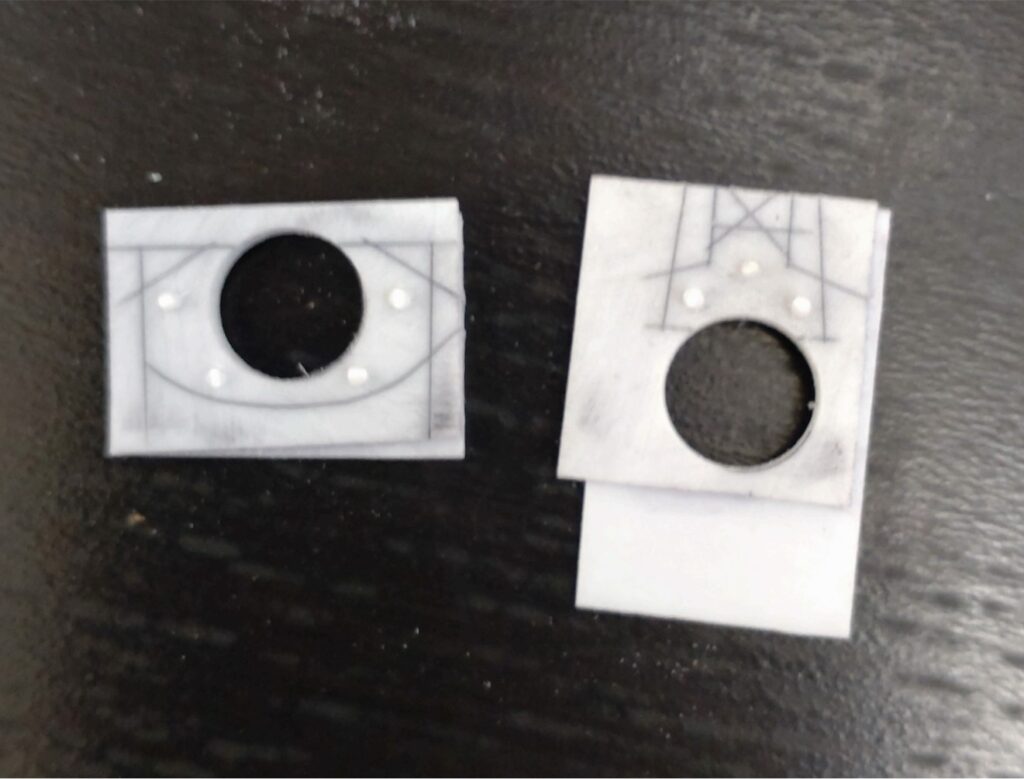
股関節フレームは股関節軸の保持と腰前後屈関節を盛り込むため非常に複雑な形状になりました。
プラ板にケガいて穴を開けた後、地道に形状を切り出して、貼り合せて作成しました。
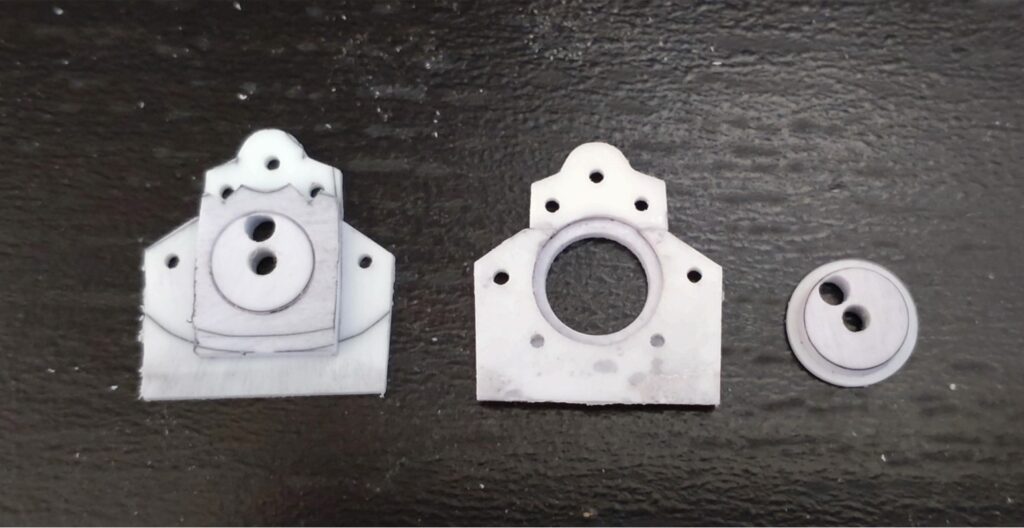


完成した股関節フレームを前後屈させると、いい感じに動くことが確認できました。
設定した形状的には前後屈ともに20°曲がるのですが、実際に何度曲がるかは検証していません。
腰前後部品
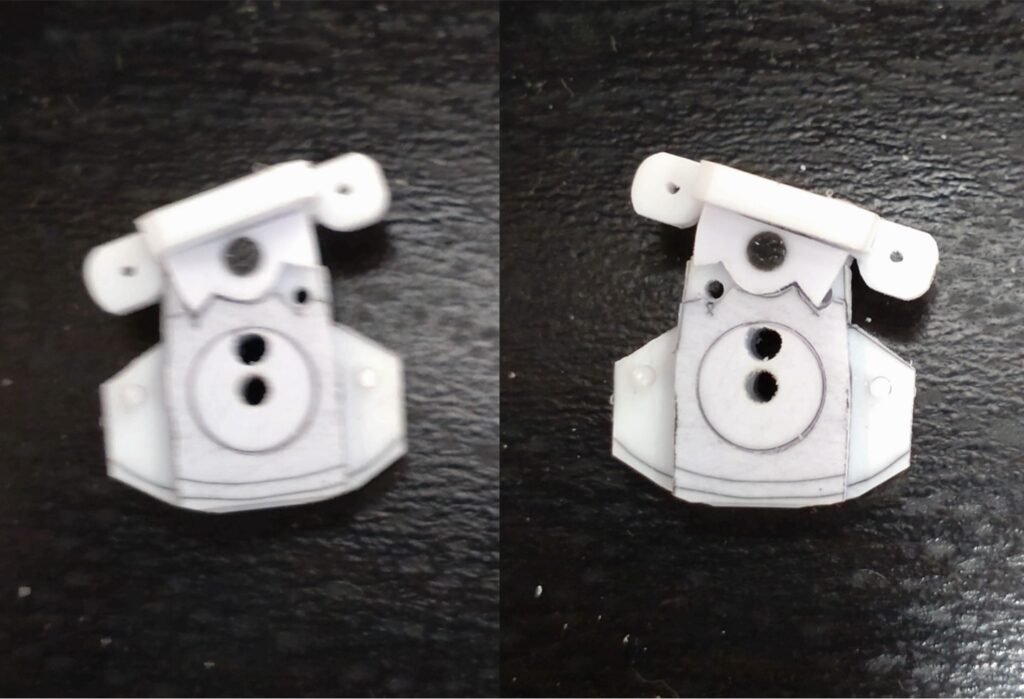
腰前後部品は前後屈時の連動ギミックを盛り込んでいるため非常に複雑な形状になりました。
こちらも地道にカットしていき、貼り合せて形状を出しています。
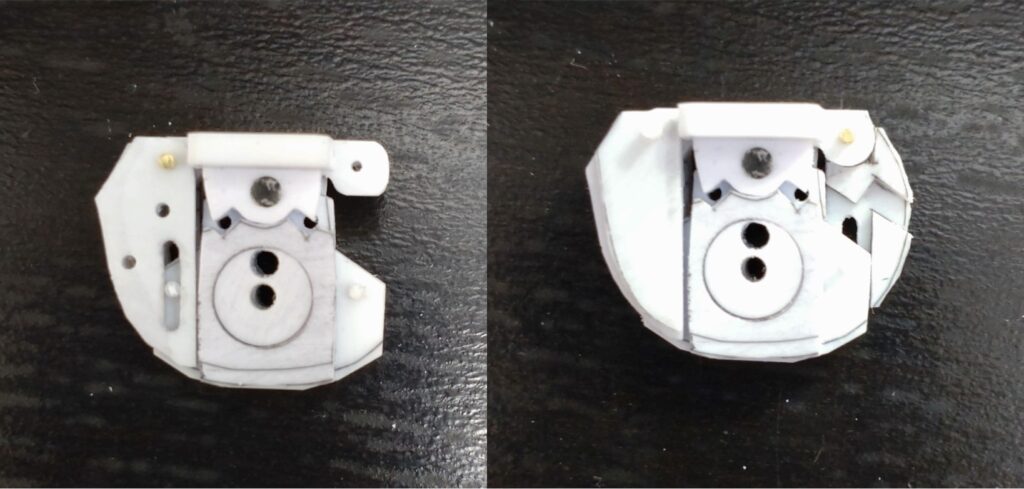

全体像
全体像はこのようになりました。思っていたより可動用の隙間が大きくなってしまったところもありますが、概ね狙った可動もできて満足です。
実際に全体を組み上げた際に、股関節軸の回転可動がうまく機能するかが少し不安ですが、まずはこれで完成としたいと思います。



最後に
今回はデスフィズに取らせたいポージングをイメージしながら、それを再現するための関節ギミックの盛り込みを行いました。
実際の形状の設定はCADを使って行っていますが、CADでポージング含めた可動検証ができるほど技術的にも環境的にも余裕はないので、今回のギミックが実際にポージングに効くかは完成してみないとわかりません。
でもなかなかいい動きができる関節ができたと感じているので、残った部品もテンション高めて作成していきたいと思います。
ではっ!!


コメント