

こんにちは、MIBです。
本日はデスフィズの足部の製作方法について紹介します。
ロボットものにとって足部は自立の要になる部位であるだけでなく、曲面で構成されることも多く、さらに足裏にはモールドを彫り込んだ方が見栄えが良いという、自作の際のポイントの詰まった部位であると考えています。
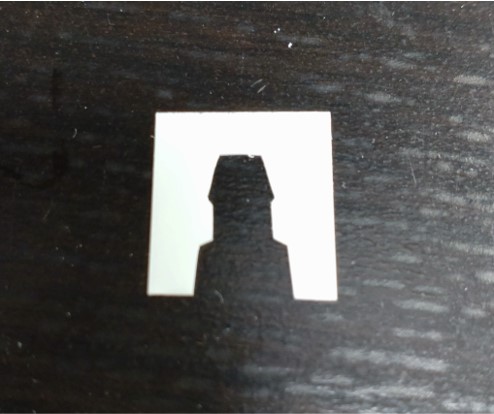
足首関節の製作
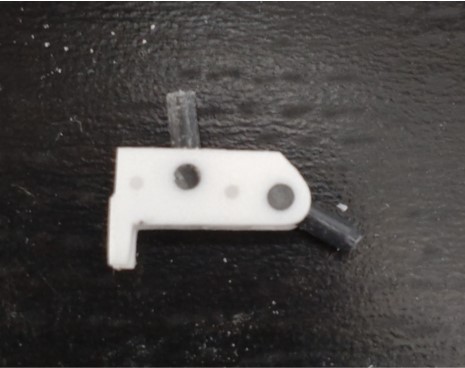
まずは足首関節を作りました。
1mmプラ板4枚構成で、2枚ずつ接着し中央部はΦ1のプラ棒でダボ嵌合にしています。
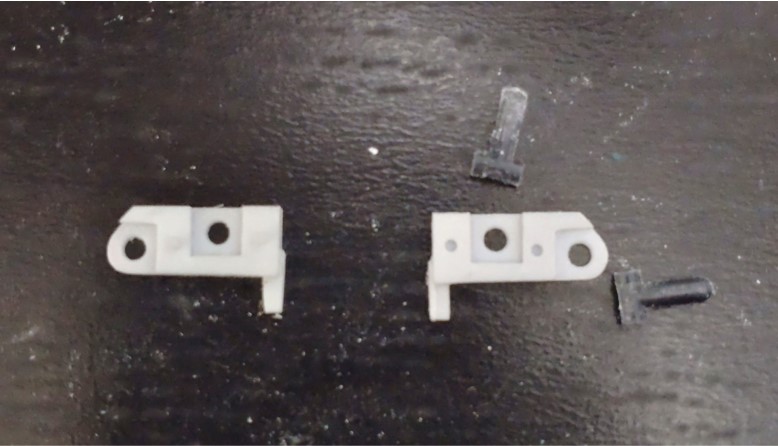
可動は足首とつま先側にΦ2のポリランナーを仕込めるようにしています。
ポリランナーはwaveのポリキャップのものを使っています。
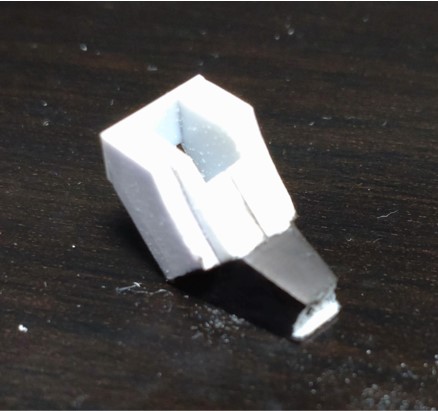
つま先の製作
つま先は2mm、1mm、1.5mmのプラ板の組み合わせで基本形状を作っています。
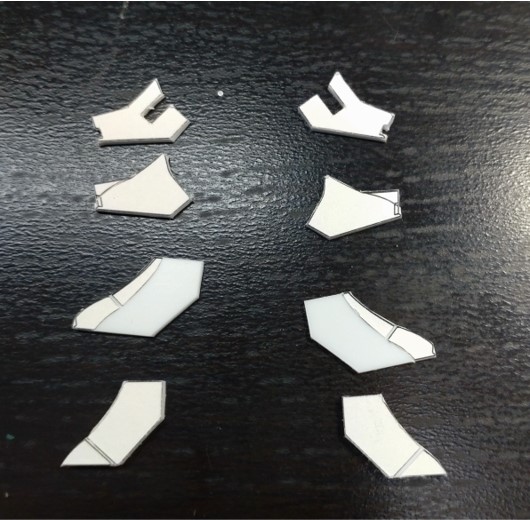
プラ板を切り出して積層した後、イメージする曲面形状を削り出していきました。
先端側と根本側で分けて削ることで、曲率の違いを出しやすくしています。
黒いのは表面の仕上がり確認用の油性ペンでの色付けです。
(においが気になってサフが吹けない環境なのでいつも油性ペンで確認しています)

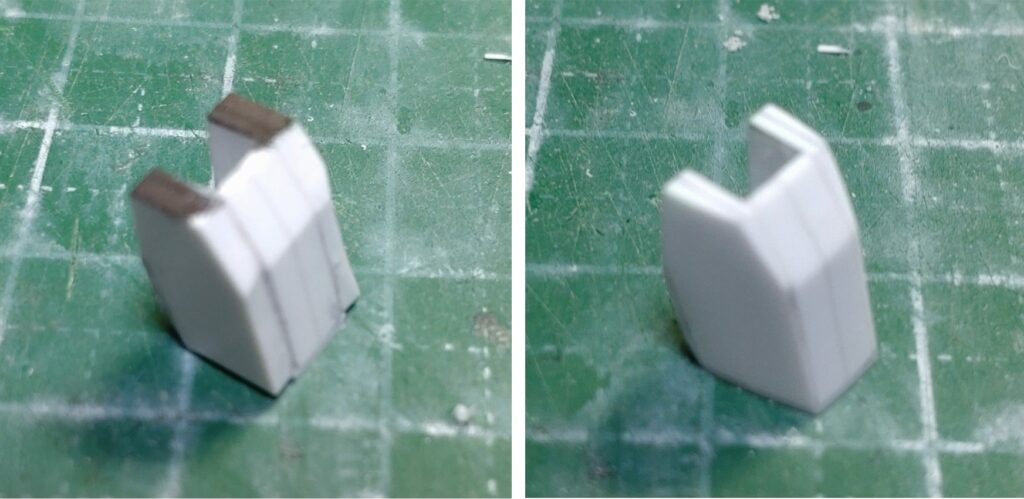
かかとの製作
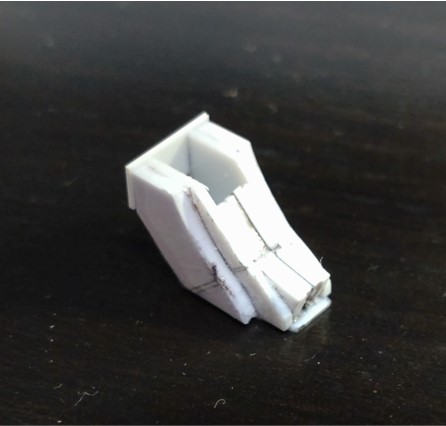
かかとは2mmプラ板4枚構成です。
プラ板を切り出して貼り合せたあと、つま先と同じくイメージする曲面を削っていきました。
ここまでで足部の基本形状は完成です。

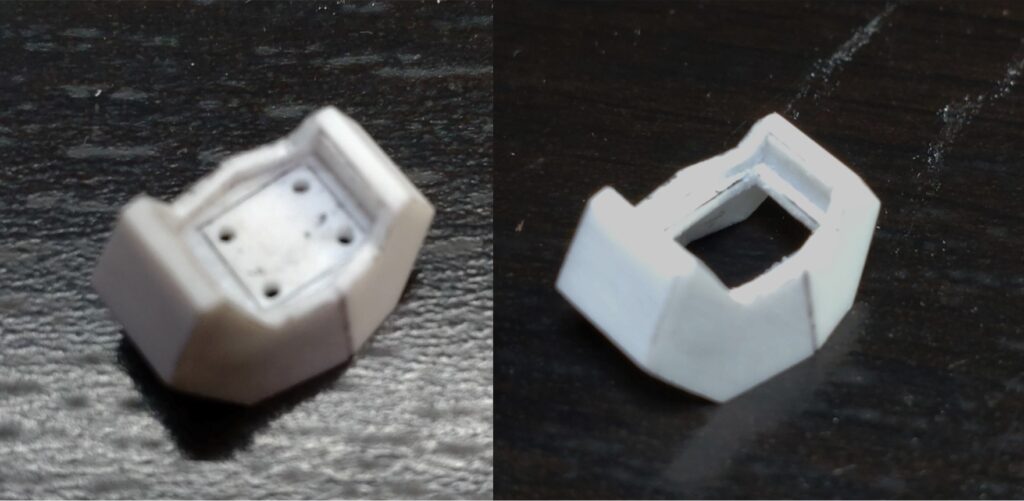
足裏モールドの作成
足裏モールドは0.3mmプラ板をメインに使っています。
段差として貼り付ける部分を切り取ったプラ板を足裏に貼り付けますが、足裏には事前にモールドを掘っています。
外側には大きくはみ出した状態となりますが、この状態で接着剤を十分乾燥させることで表面と面一に仕上げやすくなります。
ほかの部分もプラ板を貼り込んで、細かなモールド(丸や長方形の部分)も貼り付ければ足裏の完成です。

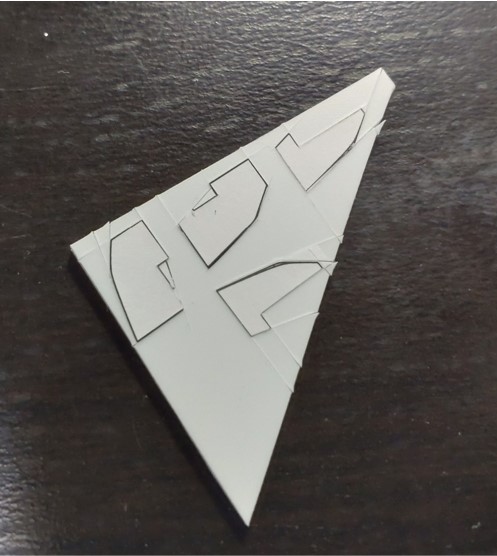
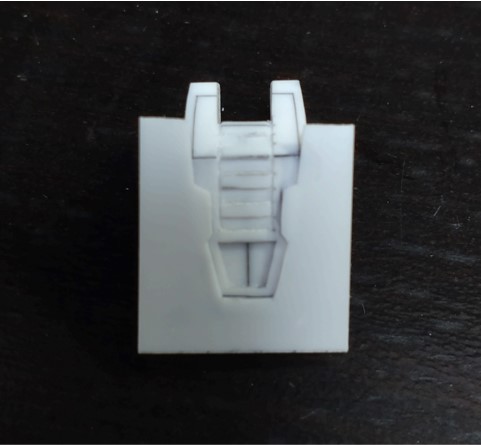
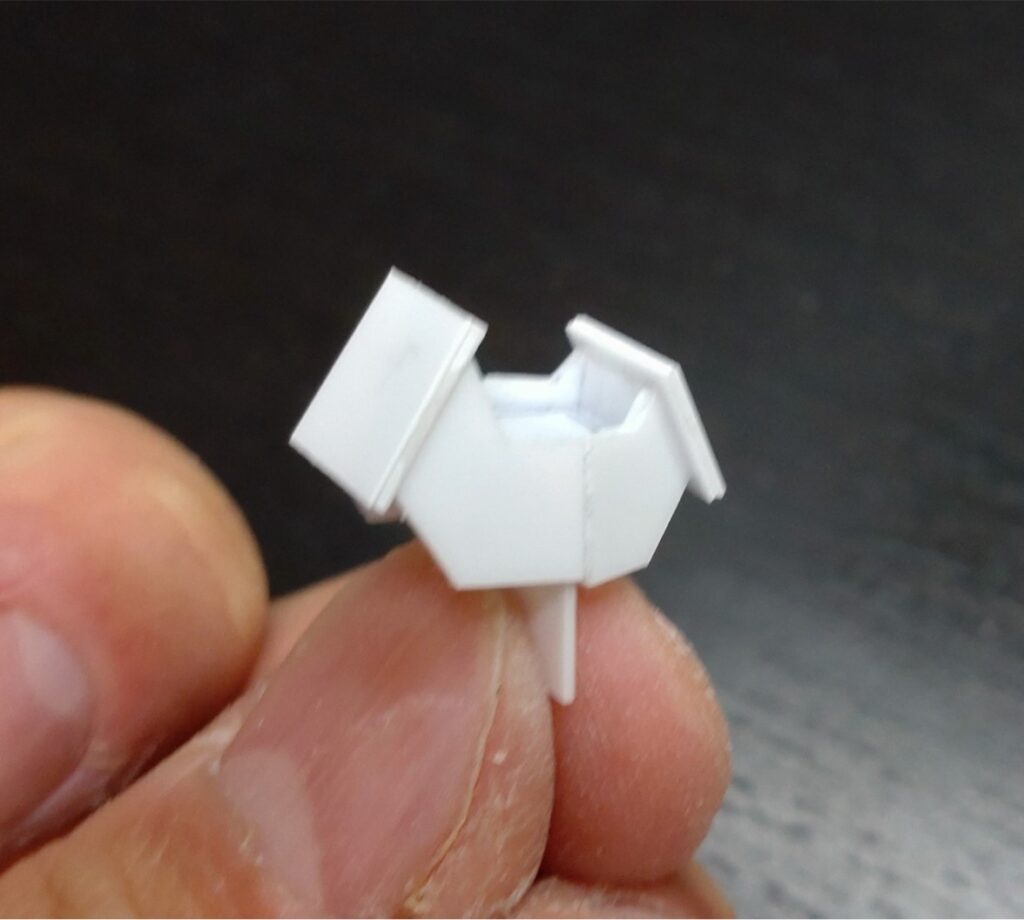
足首アーマーの製作
足首アーマーは1mmプラ板をもとにして作りました。
水平・垂直面が少ないため、まずはベースとなる部分をかっちり作りました。
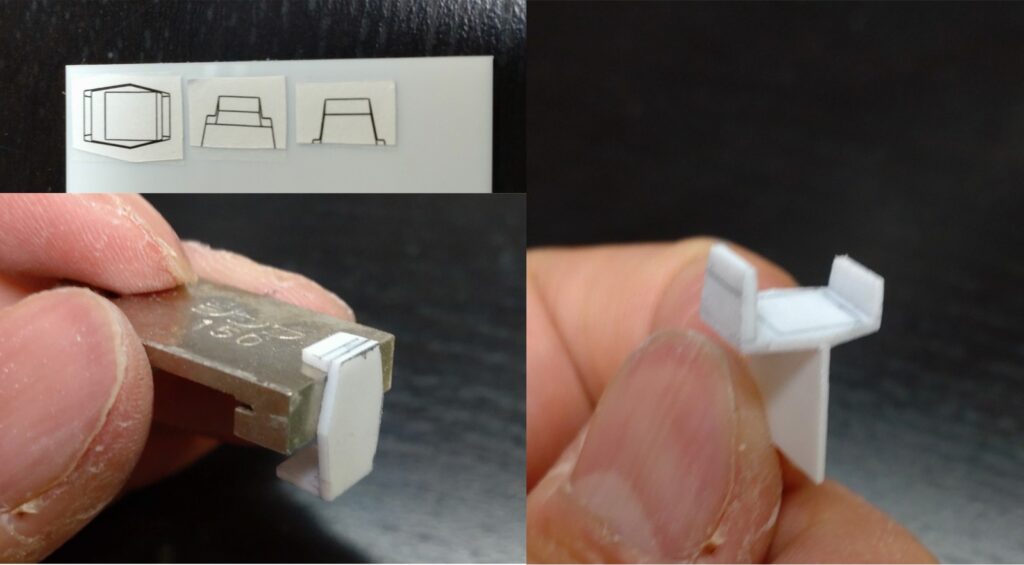
側面形状を切り抜きますが、中央のラインで折れ線が入るためプラ板はここでカットしておいて、あらかじめ溶剤系接着剤で貼り付けています。

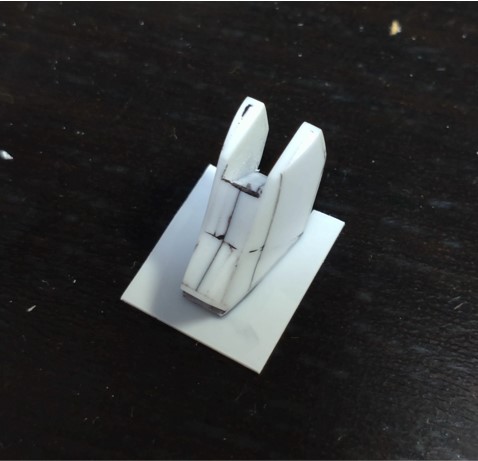
あらかじめ接着していた部分を曲げて、折れ線を再現しながらベースに側面形状を貼り付けます。
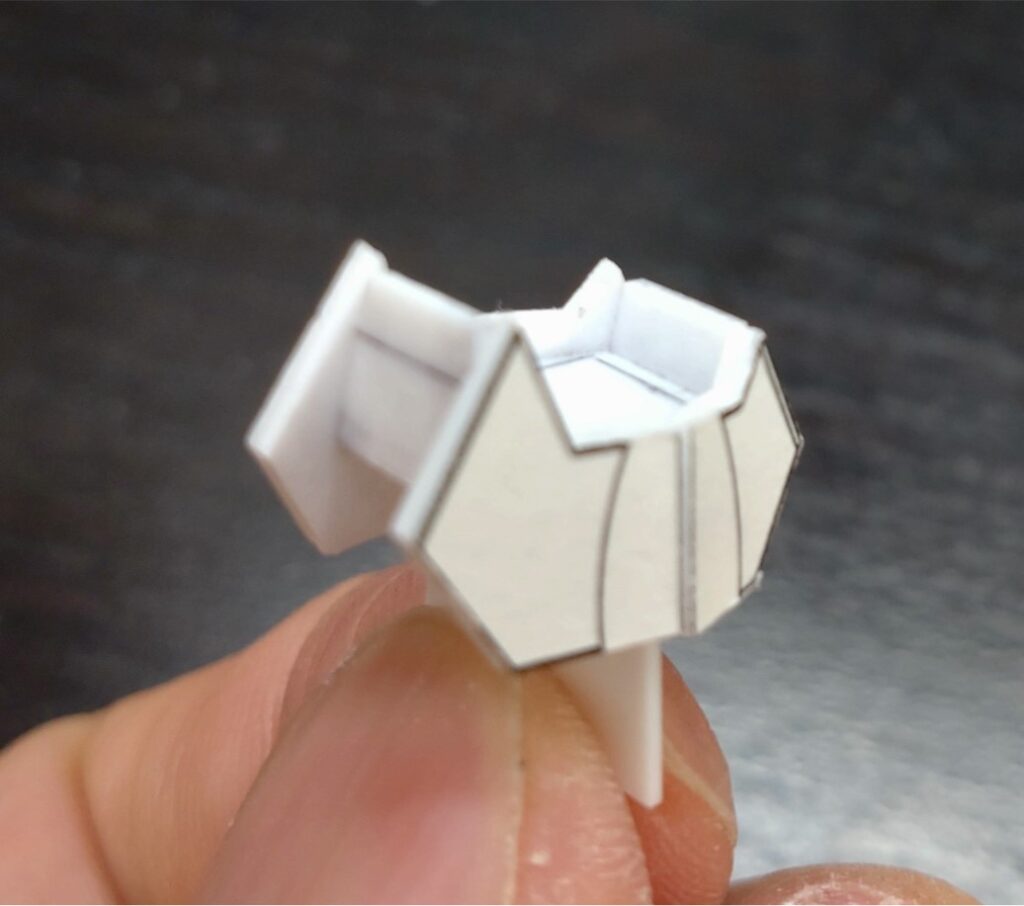
最後に前後面にプラ板を貼り付けて基本形状は完成です。
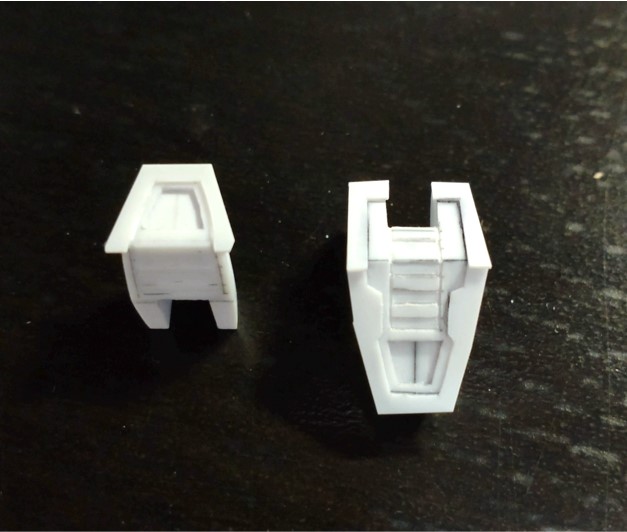
基本形状作成中の強度を確保するためベースは板状をキープしていましたが実際に組む時のために不要部を穴開けします。
ここまでで足部がおおよそ完成しました。
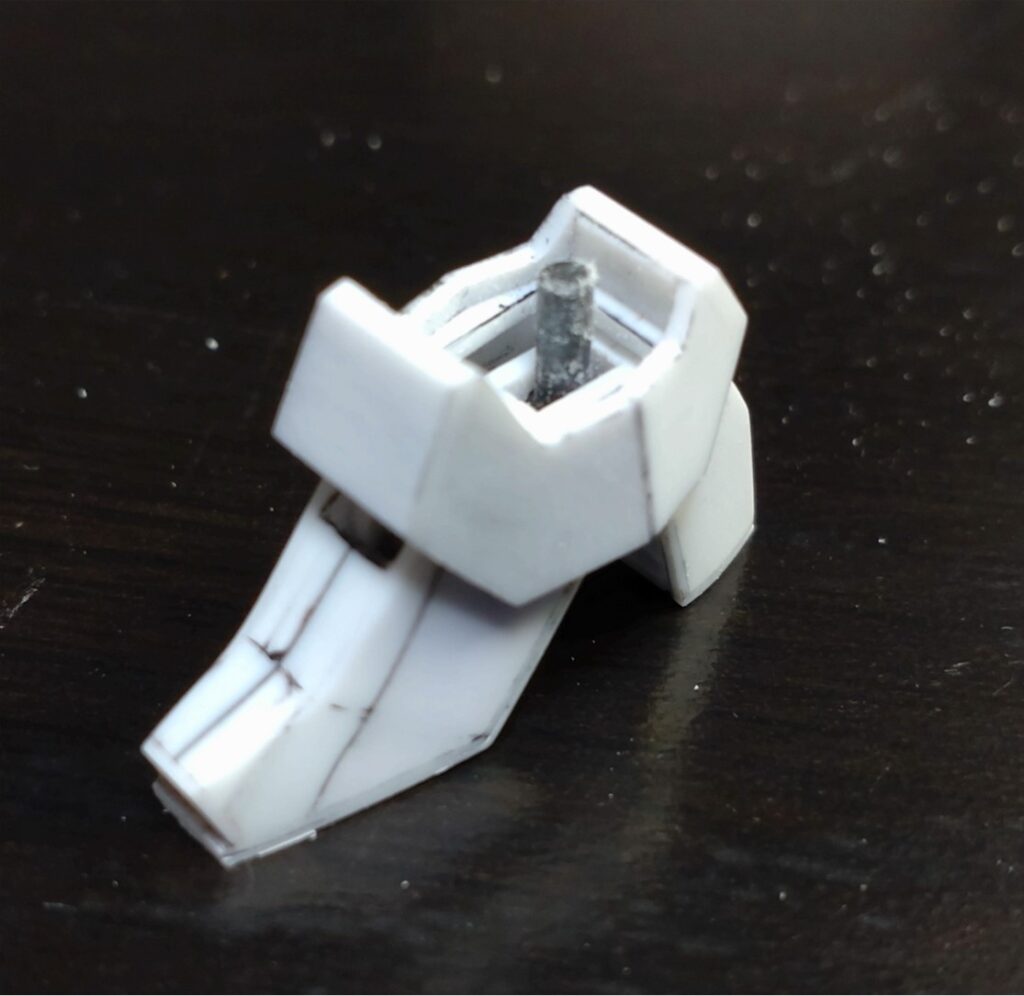
まとめ
今回作成した足部を脚部と合わせてみました。脚部の調整は必要ですが、側面などはデスフィズらしさが出ているのではないかと感じています。

脚部作成はプラ板メインで行いましたが、自分の場合作りたい形状やギミックがまとまっている場合はやはりプラ板メインで進める方がやりやすいと感じました。
脚部はエポパテメインで進めるとして、その他の部分の作り方についてもよく考えて決めていきたいと思います。
ではっ!

コメント